About Me
I am a PhD student at The Johns Hopkins University in the department of Applied Math and Statistics. My work primarily focuses in optimization, under the supervision of Benjamin Grimmer. My interests align with design and analysis of optimal first-order methods. In particular, I work on expanding classical optimization theory to apply universally to Lipschitz functions, functions with Lipschitz gradient, and everywhere in between. Dually, my work sometimes considers functions exhibiting strong convexity, simple convexity, or anywhere in between.
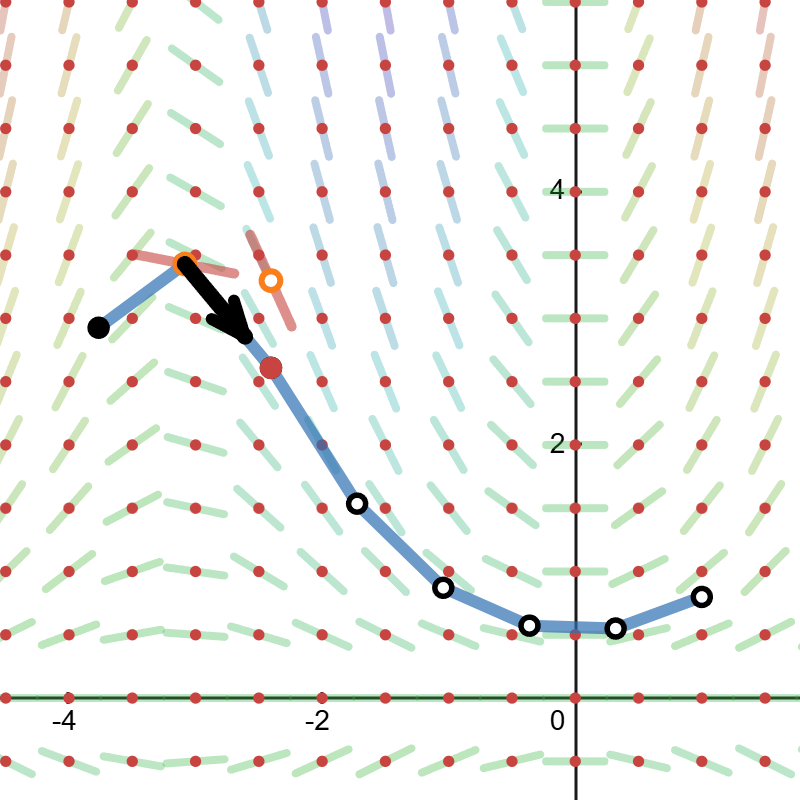
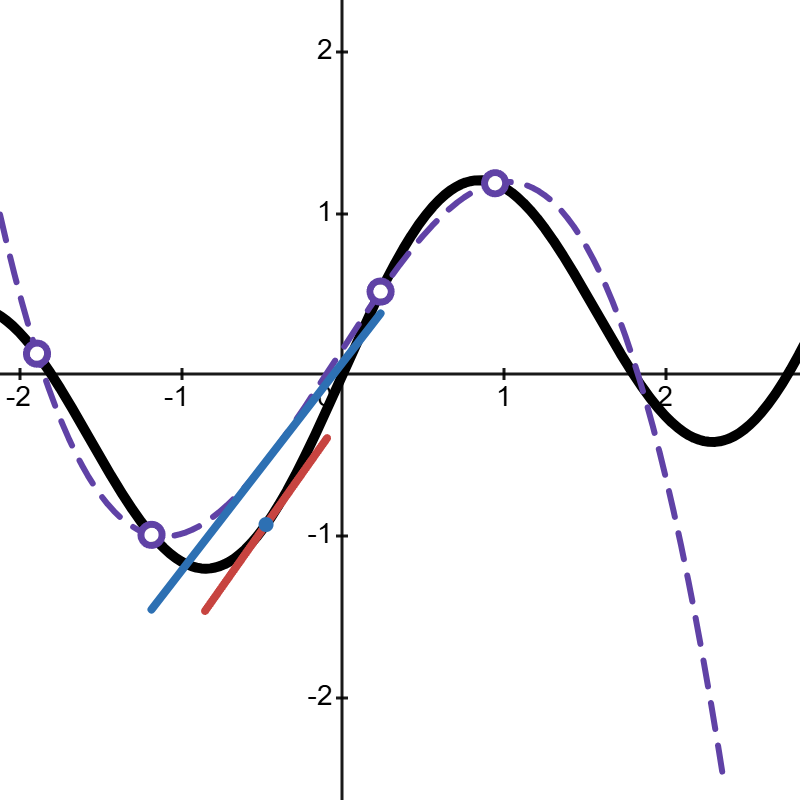
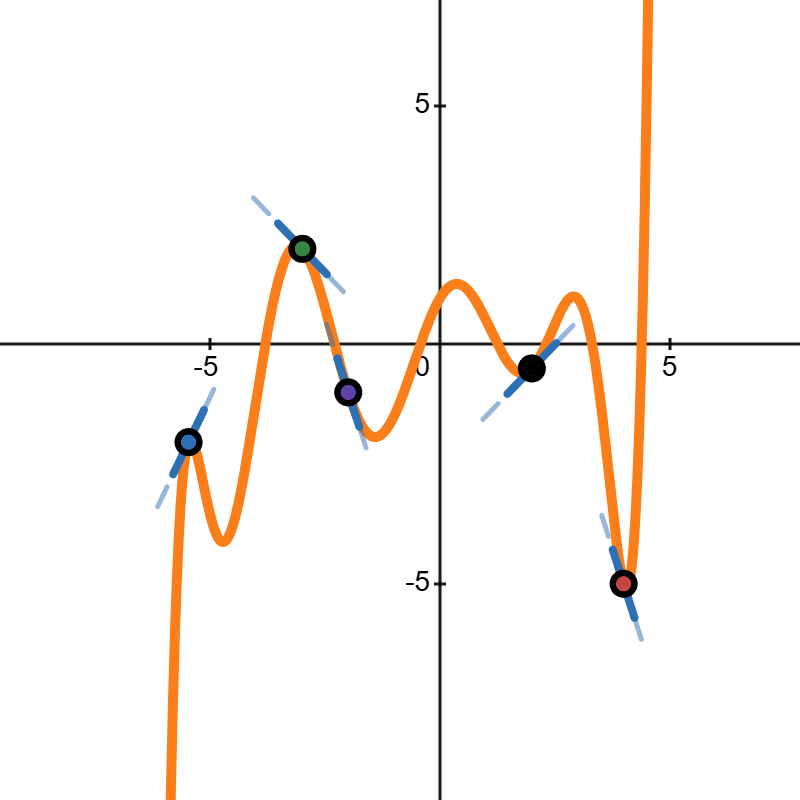
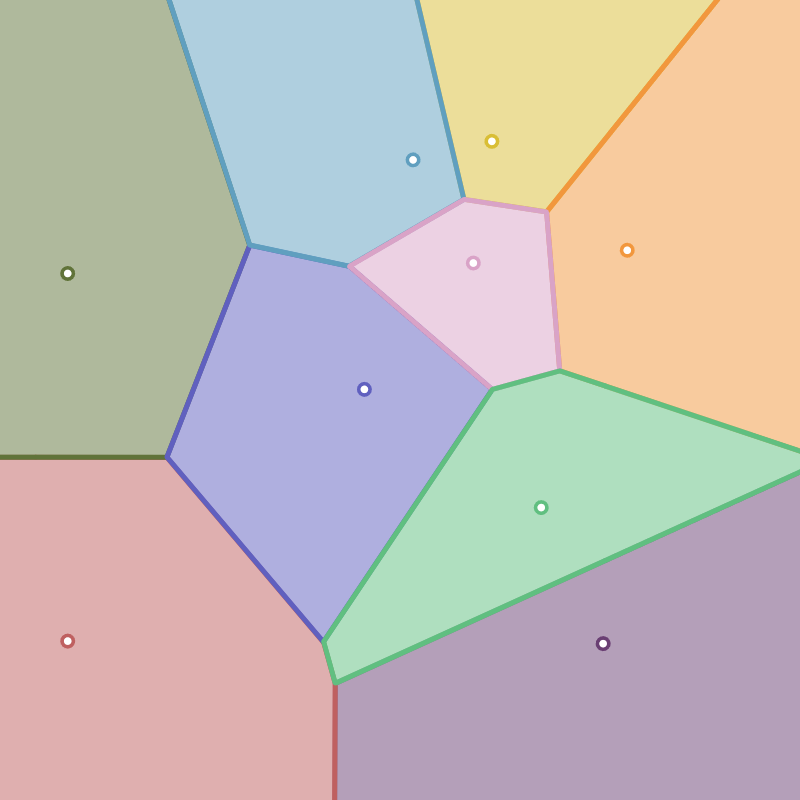
Below are a few selected papers, unifying calculus results and algorithm design for a wide range of function classes. Further below, I give selections from my Desmos Gallery, a series of interactive graphs. Feel free to experiment and play; I hope these are as fun to engage with as they were to create.